Once the data are fitted you may want to inspect the residuals between the observed counts and the modeled event distribution. This task is done using the csresmap script. csresmap will create a stacked counts cube (using ctbin) and subtract from this counts cube a model cube (computed using ctmodel). The difference will then be summed over all energy bins and divided by the model value to obtained the fractional residuals
for all map pixels.
Suppose that you have done the following unbinned ctlike analysis:
$ ctlike
Input event list, counts cube or observation definition XML file [events.fits] obs.xml
Calibration database [prod2]
Instrument response function [South_0.5h]
Input model XML file [$CTOOLS/share/models/crab.xml]
Output model XML file [crab_results.xml]
The csresmap script is then used as follows:
$ csresmap
Parfile csresmap.par not found. Create default parfile.
Input event list, counts cube, or observation definition XML file [events.fits] obs.xml
Calibration database [prod2]
Instrument response function [South_0.5h]
Input model XML file [$CTOOLS/share/models/crab.xml] crab_results.xml
First coordinate of image center in degrees (RA or galactic l) (0-360) [83.63]
Second coordinate of image center in degrees (DEC or galactic b) (-90-90) [22.01]
Coordinate System (CEL|GAL) [CEL]
Projection method (AIT|AZP|CAR|MER|MOL|STG|TAN) [CAR]
Size of the X axis in pixels [200]
Size of the Y axis in pixels [200]
Pixel size (deg/pixel) [0.02]
Output residual map file [resmap.fits]
Residual map computation algorithm (SUB|SUBDIV|SUBDIVSQRT) [SUBDIV]
In our example, the map will cover a field of 4 x 4 degrees centred on the Crab nebula at a pixel scale of 0.02 degrees per pixel. The resulting residual map resmap.fits, smoothed with a Gaussian kernel of 3 pixels to enhance features, is shown in the following figure. Obviously, the map is free from any significant residuals.
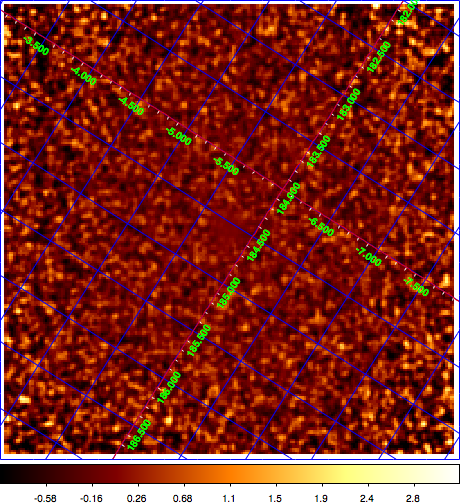
Residual map of the Crab region